

Autonomous Quadcopter 2011-2015
2011
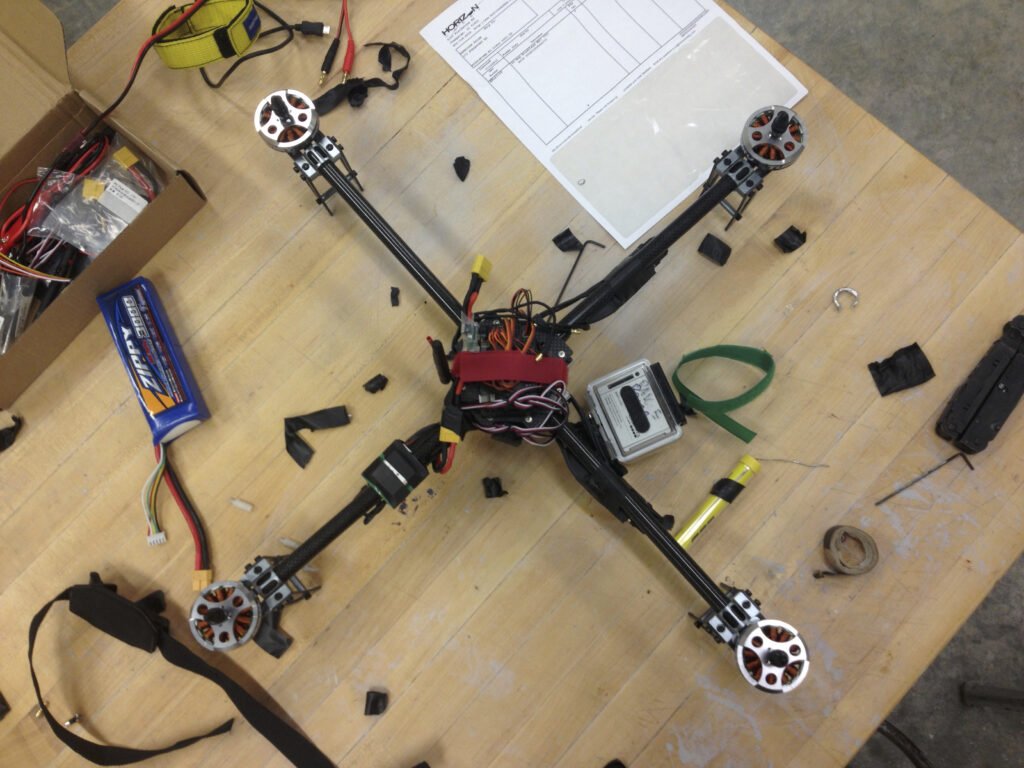
- Began designing autonomous quadcopters using an open-source Arduino based microcontroller “Ardupilot”. Contributed code.
- Routine rapid iteration via design-build-test cycle. Many of the parts sourced were only available via China with a 3-4 week lead time. 3D printing was just coming to market. Modeled the frame assembly in Solidworks, simulated the landing forces causing deformation beyond yield. 3D printed in a more suitable aluminum alloy and vie commercial 3D printer. These parts solved the deformation problem, cost less than the originals, and arrived in half the time. This was my first proper experience managing a supply chain.

2012

2013
Iteration of quadcopter designs continues. DJI comes to market and my quadcopter development becomes a hobby. My experience with remote additive manufacturing leads me to propose an additive manufacturing lab to my high school. This was just as the first consumer 3D printers were coming to market.


2014
Continued work on the drone as the real-estate photography market made it cost effective. I spent much of my time carefully refining PID loops to improve the stability and thus image-quality of the platform to a level suitable as a commercial product.

